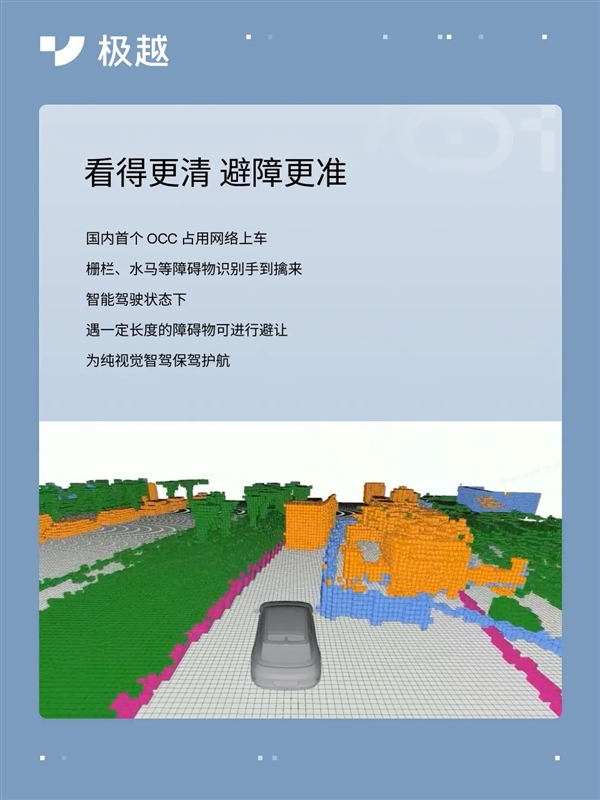
极越01最近成功进行了智驾软件的OTA升级,其中最令人瞩目的是业内**的OCC(Occupancy Network)占用网络技术的正式应用。这次升级进一步巩固了极越01在智能驾驶领域的**地位,预示着其将很快实现“**覆盖”的目标。
这次产品升级不仅整合了“BEV Tran**ormer OCC”的纯视觉解决方案,还结合了“百度地图车道级导航”,为智能驾驶提供了双重支持。OCC占用网络的引入,使得极越的纯视觉系统在感知和识别方面有了显著提升。据百度智能驾驶事业群组(IDG)**研发架构师王亮介绍,OCC技术可以让智能汽车更准确地辨识物体,障碍物种类辨识率高达99%。
百度地图车道级导航迎来了一次重要升级,借助业内**的地图生成大模型,已经成功制作了覆盖**360万公里道路的LD车道级地图数据。这一里程碑不仅将使得城市精准定位技术PPA达到传统高精度地图的水平,还将为智能驾驶在**各地复杂城市道路上的快速推广提供重要支持。
LD车道级导航将在百度地图各端陆续上线360座城市,同步支持极越PPA**开城。这意味着,只要百度地图导航覆盖的地方,极越智驾都能实现精准导航和自动驾驶。极越CEO夏一平对此表示:“我可以预告一下,极越智驾会很快做到**都能开。打开百度地图APP,只要百度地图导航里有的地方,**是百分之百都能开。”
与其他车企所提供的“无图”方案相比,百度地图LD车道级导航在要素丰富性、更新速度和精准度方面都表现出色。这一技术在成本可控的情况下,为用户提供了更安全、更顺畅的智能驾驶体验。